
ZETO (Zero Emission Taxi Operations) is a research project funded by the German Federal Ministry for Economic Affairs and Energy (http://www.bmwi.de) in the context of the program “Luftfahrtforschungsprogramm”.
The objective of this joint project of TU Darmstadt and TU Braunschweig is the evaluation of an innovative approach which foresees the implementation of trajectory-based taxi operations supported by a semi-automated towing vehicle. The project is co-sponsored and supported by industry partners. The focus of the Institute of Flight Systems and Automatic Control (FSR) of TU Darmstadt is on the pilots' role and their integration into the newly defined taxi operations.
Trajectory-Based Dispatch Towing
International air traffic programs like SESAR and NextGen propose the implementation of trajectory-based operations in order to deal with increasing capacity demands. One major aspect of trajectory-based operations is the realization of time or velocity constraints for flight planning and execution. As the taxi phase does not only mark the first and last step of every flight, but also serves as a connecting element between two consecutive flights, precise trajectory-based flight operations require predictable taxi procedures. Thus, by implementing trajectory-based taxi operations, the gate-to-gate process can be fully defined.
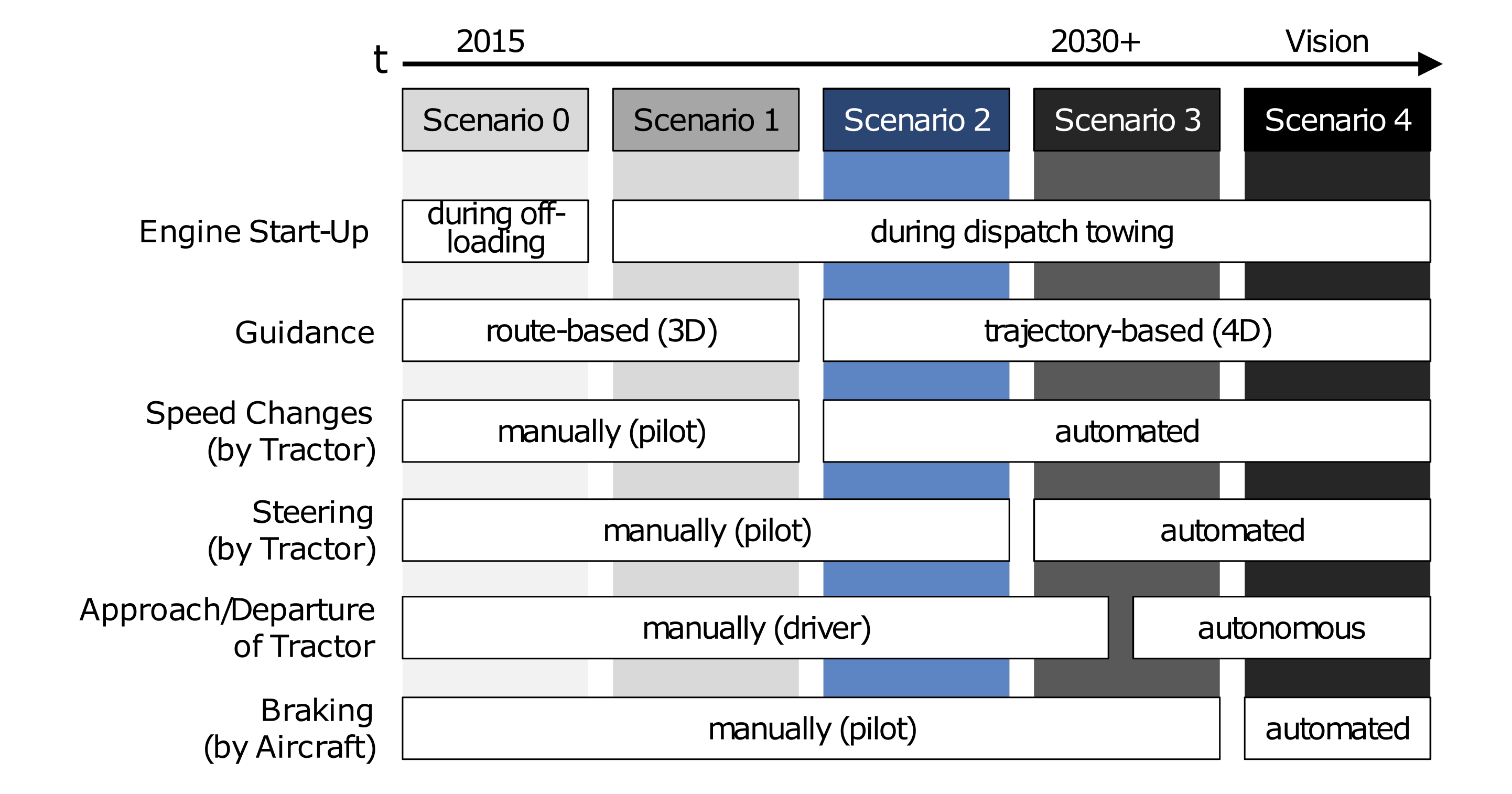
Accordingly, the project ZETO investigates the idea of trajectory-based dispatch towing. In this concept, a modified semi-automated tractor tows commercial aircraft according to an optimized predefined speed profile from gate to runway and vice versa. By the utilization of a tractor for trajectory execution, conventional aircraft can be integrated into trajectory-based taxi operations without further modifications. On the basis of literature review, on-site visits, expert interviews with relevant stakeholders at Frankfurt Airport and a joint user forum at TU Darmstadt, a chronological implementation guideline in terms of a scenario description has been carried out.
Integrating the Cockpit Crew
New operational towing procedures call for new interaction concepts integrating the cockpit crew. A human-machine interface (HMI) developed at the institute FSR shall provide required information and guidance to the pilots in a user-friendly way. The final HMI design is the outcome of a user-centered design process including expert interviews and a pre-study with airline pilots in the Airbus A320 flight research simulator D-AERO.
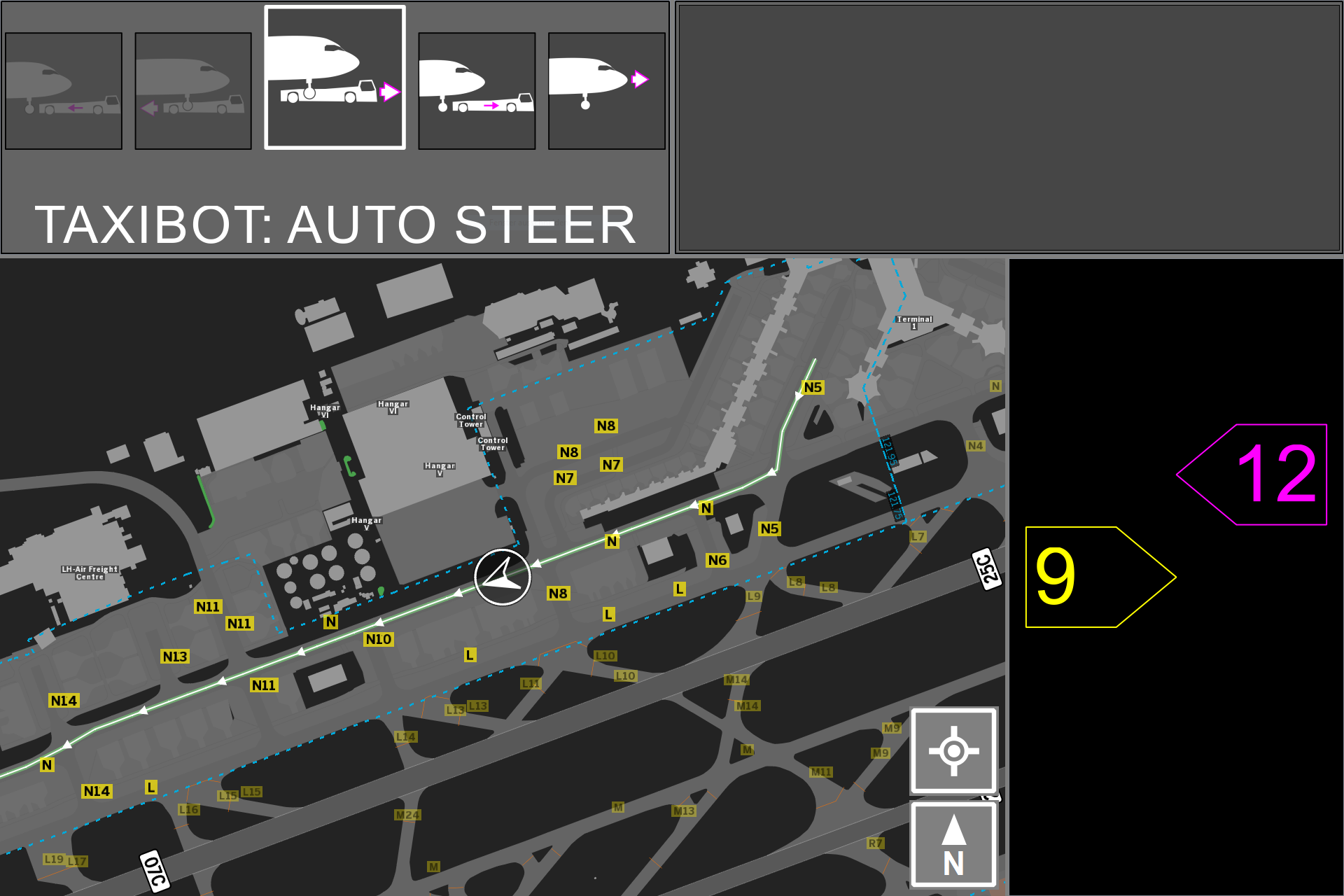
The prototypical graphical interface runs on an emulated electronic flight bag (EFB) device. In accordance with the project's retrofit approach, the implementation via an EFB can be transfered to aircraft without additional modifications of the primary cockpit systems.
Pilot Evaluation in Flight Research Simulator D-AERO
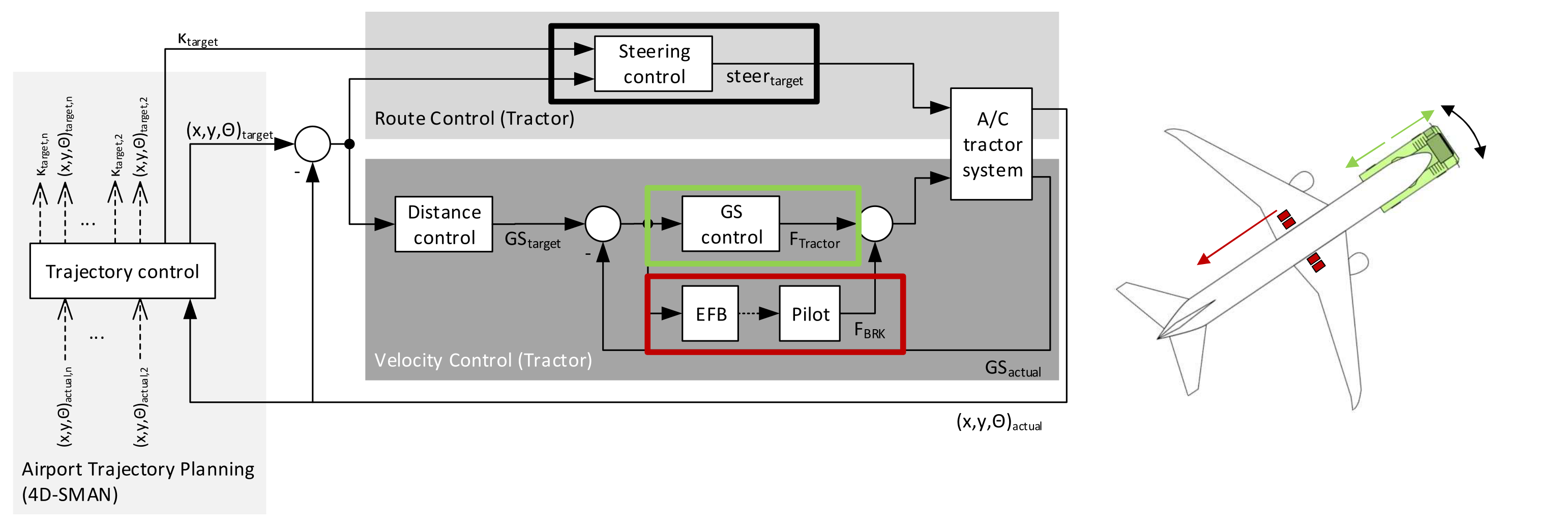
The final simulator evaluation took place in the institutes flight research simulator D-AERO which has been enhanced with an automatic trajectory control unit and the integration of the developed HMI. The trial provided insights of both the general applicability of trajectory-based operational towing procedures and a comparison of different modes of automation. The main research question deals with the valuation of several automation modes (steering, accelerating, decelerating, braking) with respect to optimized pilot integration. Following parameters have been considered:

The generic soft- and hardware architecture of the simulator allowed for a seamless integration of the required adaptations. The simulation of an Airbus A320 ensured that all participating commercial airline pilots experienced a familiar environment. Besides the simulation of conventional engine taxiing, four different trajectory-based towing modes have been conducted in order to investigate varying cooperation levels between human and automation.
During the trials, following subjective measurements have been captured:
- System Usability Scale (SUS) Score,
- raw NASA Task Load Index,
- personal ranking of automation modes, and
- open pilot feedback.
Furthermore, the
- trajectory error (position deviation) and the
- reaction time (recognition of foreign objects)
allowed for objective outcomes.
Further questionnaires and discussions provided insight into the pilots' general attitude toward trajectory-based towing procedures and its implementation in ZETO. The results of the study are summarized in the final project report.


