
ZETO (Zero Emission Taxi Operations) ist ein im Rahmen des Luftfahrtforschungsprogramms des Bundesministeriums für Wirtschaft und Energie (http://www.bmwi.de) gefördertes Forschungsvorhaben.
Ziel des Projekts ist die Untersuchung innovativer trajektorienbasierter Rollverfahren, die mittels eines teilautomatisierten Flugzeugschleppers realisiert werden sollen. Das Verbundvorhaben der Technischen Universitäten Darmstadt und Braunschweig wird von Partnern aus der Industrie unterstützt. Die Arbeitspakete des Verbundführers TU Darmstadt werden am Institut für Flugsysteme und Regelungstechnik (FSR) bearbeitet und betrachten primär die Integration der Cockpitbesatzung in die neuartigen Rollverfahren.
Trajektorienbasierte operationelle Schleppverfahren
Um den zukünftigen Kapazitätsanforderungen an das Luftverkehrssystem gerecht zu werden, beschäftigen sich internationale Programme wie SESAR oder NextGen mit der Einführung trajektorienbasierter Verfahren. Diese zeichnen sich insbesondere durch die Berücksichtigung zeitlicher Vorgaben in der Flugplanung und -Durchführung aus. Um den Ansatz der vollständig definierten Trajektorie zwischen Ursprungs- und Zielgate umsetzen zu können, müssen auch die Rollbewegungen der Flugzeuge in die Trajektorienplanung eingebunden werden.
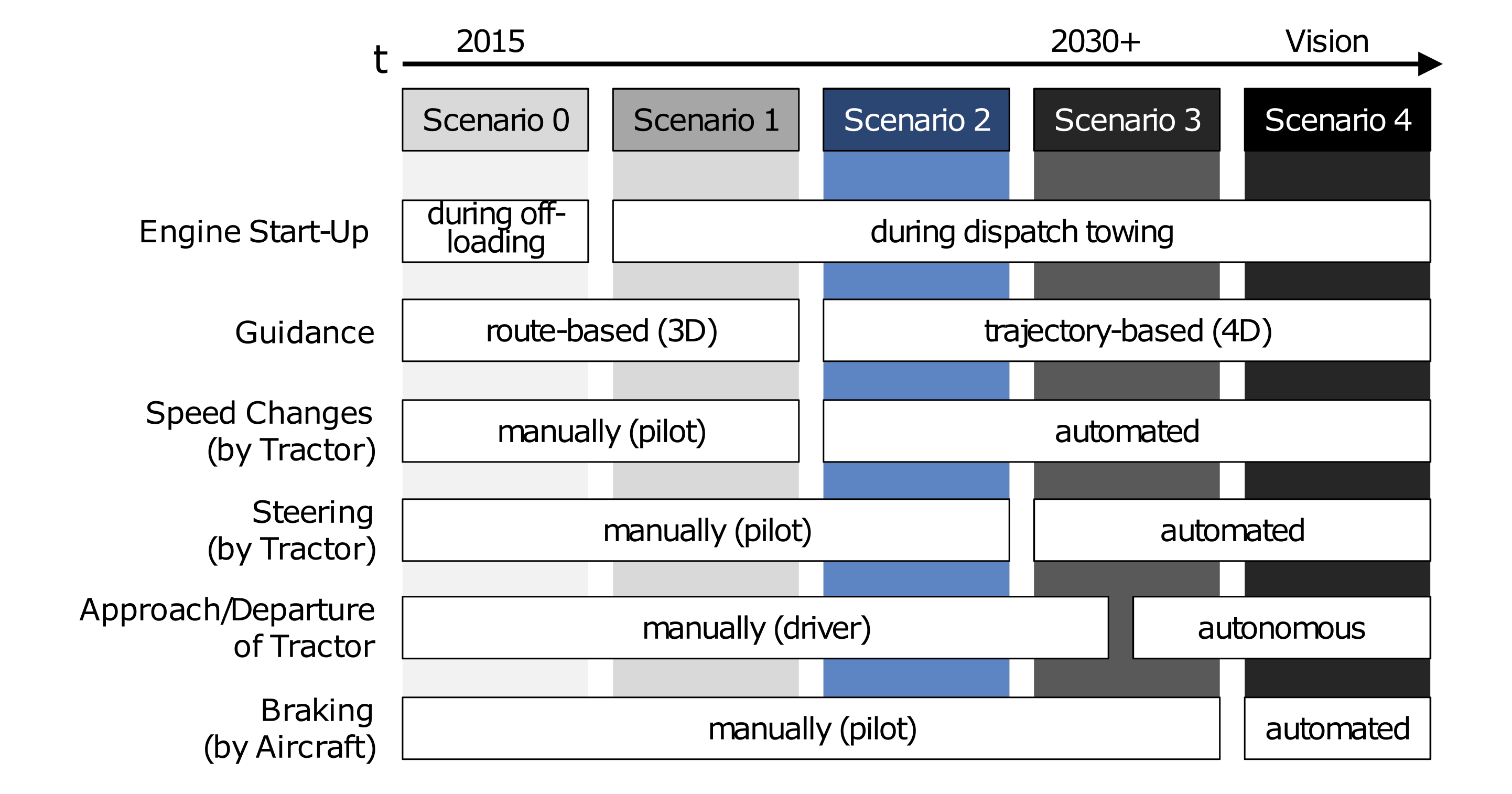
In ZETO wird daher der Ansatz des trajektorienbasierten operationellen Schleppens untersucht. Dieses Konzept sieht die Verwendung eines modifizierten teilautomatisierten Flugzeugschleppers, der das Flugzeug entsprechend optimierter Geschwindigkeitsprofile vom Gate zur Startbahn zieht, vor. Der Einsatz von Flugzeugschleppern zur Trajektorieneinhaltung ermöglicht es, konventionelle Flugzeuge ohne zusätzliche Modifikation in zukünftige trajektorienbasierte Rollverfahren einzubinden. Basierend auf Recherche, Expertengesprächen am Flughafen Frankfurt sowie eines an der TU Darmstadt durchgeführten Anwenderforums wurden die schrittweise Einführung der Verfahren in Form von Szenarioentwürfen definiert und zugehörige Automatisierungsstufen entwickelt.
Integration der Cockpitbesatzung
Die neuartigen operationellen Schleppverfahren erfordern neue Interaktionskonszepte der Cockpitbesatzung. Zu diesem Zweck wurde am FSR ein Anzeigekonzept entwickelt, welches den Pilotinnen und Piloten die je nach Automatisierungsgrad benötigten Informationen und Handlungsempfehlungen zur Verfügung stellt. In einem iterativen nutzerzentrierten Gestaltungsprozess wurden Piloten der kommerziellen Luftfahrt in einer Interview- sowie einer Vor-Versuchskampagne im Forschungsflugsimulator D-AERO einbezogen.
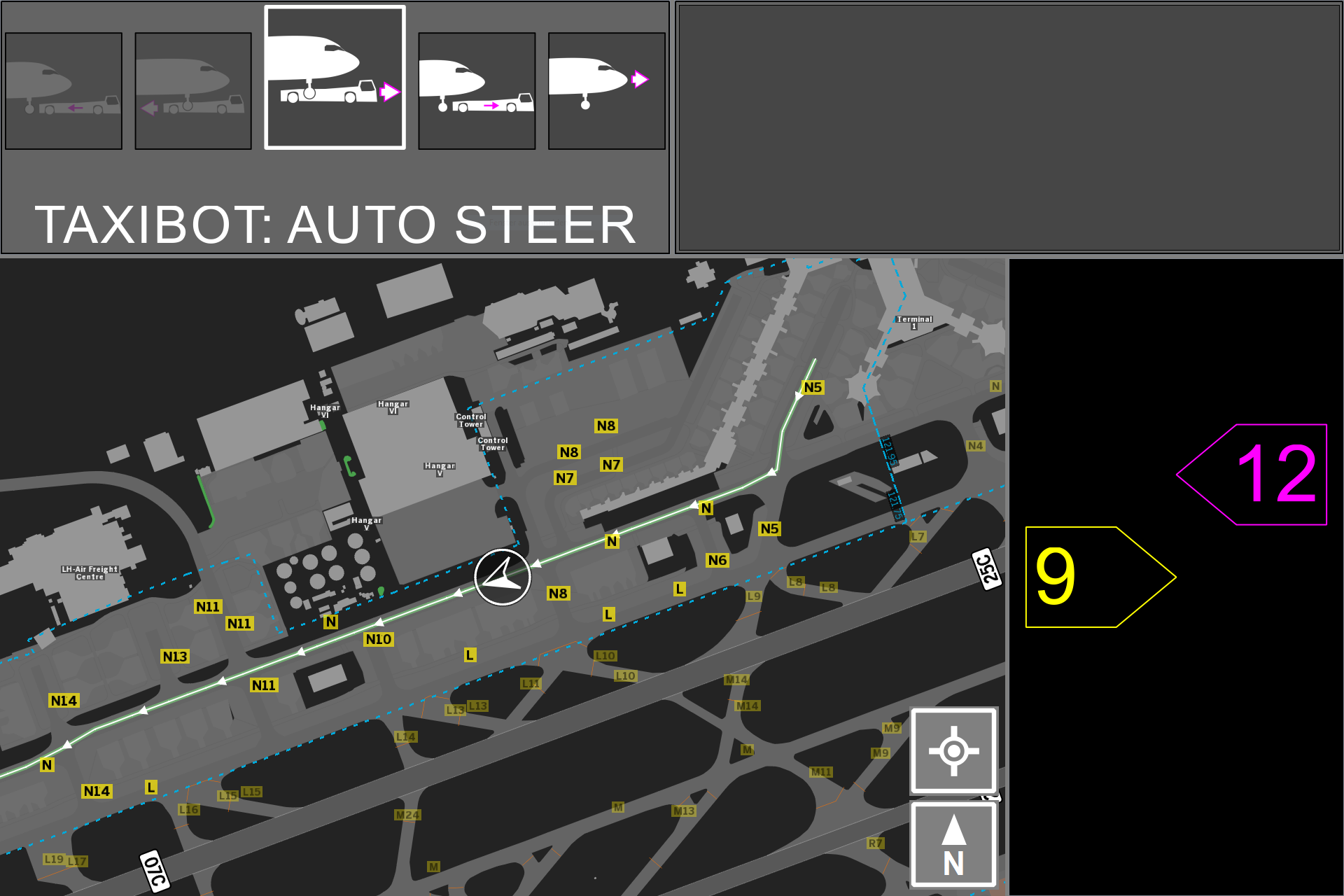
Das prototypische Anzeigesystem ist für den Einsatz auf einem Electronic Flight Bag (EFB) konzipiert, sodass entsprechend des gewählten Retrofit-Ansatzes keine Modifikationen der fest installierten Cockpitanzeigen erforderlich sind.
Probandenversuche im Forschungsflugsimulator D-AERO
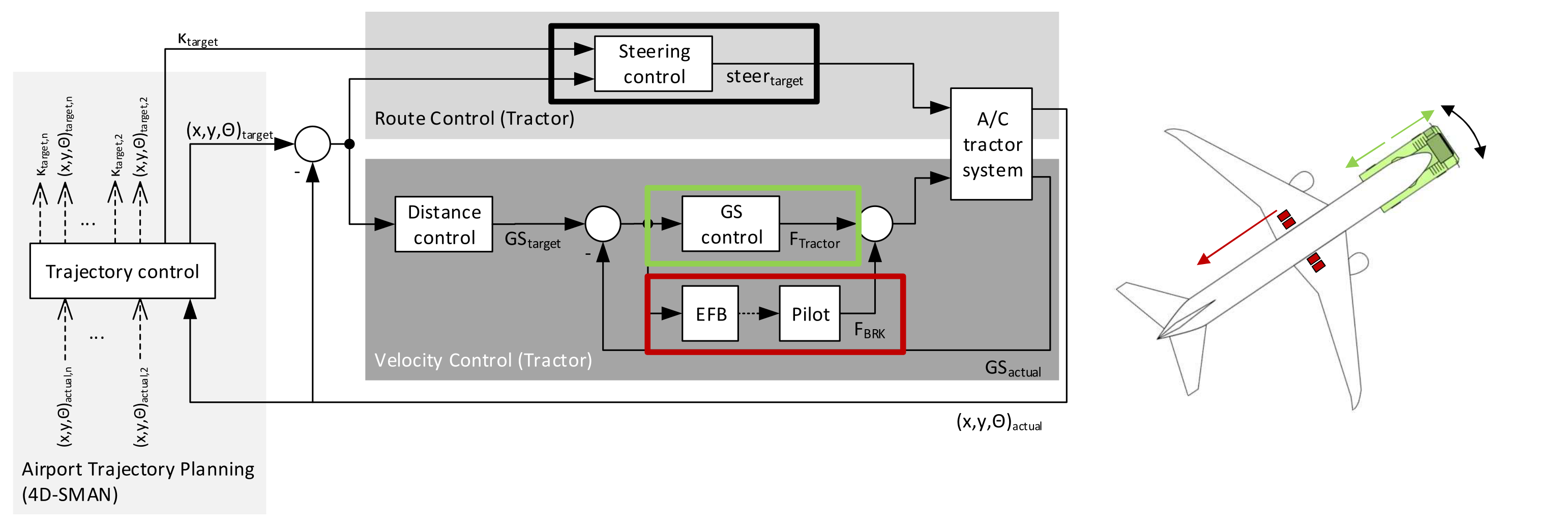
Die Implementierung des Anzeigesystems sowie die regelungstechnische Erweiterung des Forschungsflugsimulators um die Funktion der trajektorienbasierten Schleppverfahren ermöglicht die Durchführung einer wissenschaftlichen Simulatorstudie, welche einerseits der Konzeptbewertung als auch dem Vergleich unterschiedlicher Automatisierungsgrade dient. Insbesondere wurde die Fragestellung, welche Teilaufgaben (Lenkung, Beschleunigung, Verzögerung, Bremsung) von einem Regler und welche von der Pilotin bzw. dem Piloten ausgeführt werden sollten, untersucht. Im Fokus standen dabei die Parameter:

Die Probandenversuche mit Piloten der kommerziellen Luftfahrt internationaler Airlines fanden im modifizierten Forschungsflugsimulator D-AERO statt. Die offene Architektur des Airbus A320-Simulators ermöglichte die regelungstechnische Integration eines trajektorienbasierten Schleppfahrzeugs. Durch den frei anpassbaren Automatisierungsgrad lassen sich unterschiedliche Stufen der Kooperation aus Mensch und Regler realisieren.
Während der Versuchskampagne wurden die subjektiven Messgrößen
- System Usability Scale (SUS) Score,
- Raw NASA Task Load Index,
- persönliches Ranking der Automatisierungsgrade,
- freies Feedback der Probanden
sowie die objektiven Größen
- Trajektorienfehler (Positionsabweichung) und
- Reaktionszeiterfassung (Erkennung von Fremdobjekten)
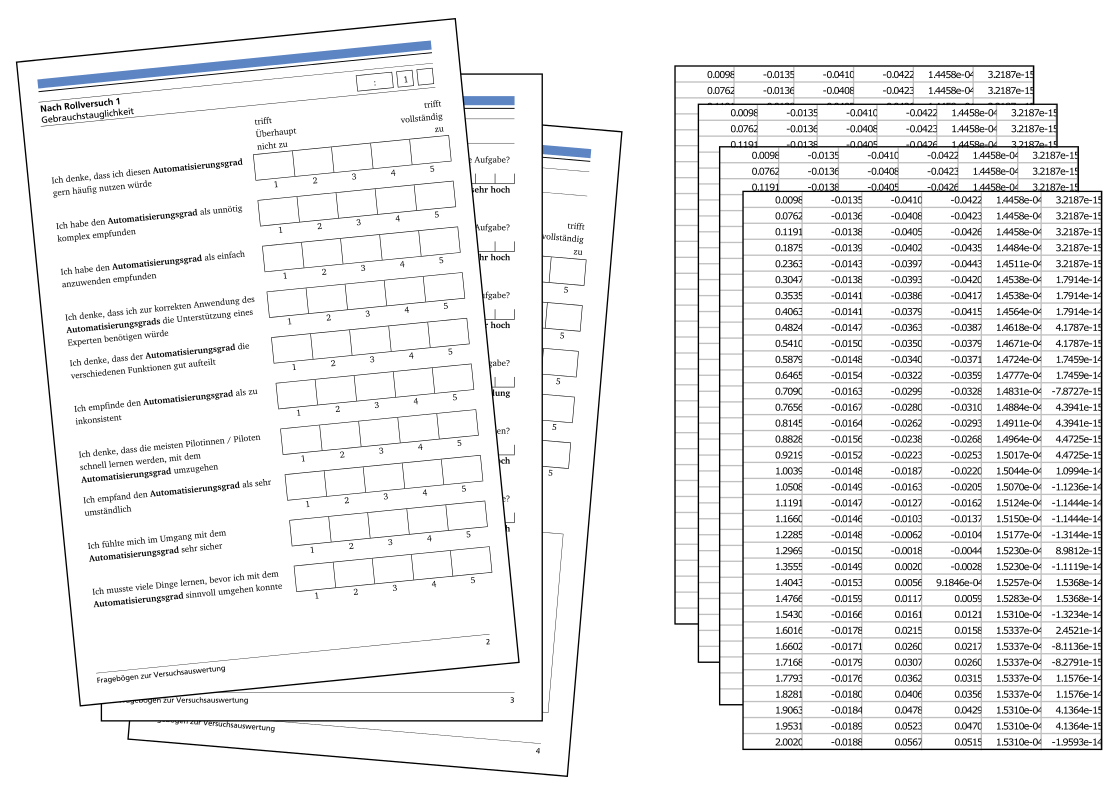
erfasst. Zudem wurde mittels weiterer Fragebögen und Diskussionen die generelle Einstellung zu trajektorienbasierten Schleppverfahren sowie der im Projekt gewählten Umsetzung ermittelt. Die Ergebnisauswertung ist im Schlussbericht des Projekts einsehbar.


