
The DACUS project (Demand And Capacity Optimisation in U-Space) aims at the development of a service-oriented Demand and Capacity Balancing (DCB) process for drone traffic management in urban environments. The success of this goal requires an extensive research on influence factors on airspace demand and capacity, definitions of roles and responsibilities, processes, and services in the scope of an Unmanned Air Traffic Management (UTM).
Background
The overall objective of DACUS responds to an operational and technical need in European drone operations to integrate the functionalities of the SESAR U-space services for UTM in order to produce timely, efficient and safe decisions.
As demand for drones over populated areas increases rapidly, there will be a need for limiting the number of operations. Future DCB management processes in the context of U-space shall assist concurrent flight planning of multiple drone operators to ensure fair access to airspace and adequate balance between system capacity and demand of drone operations. Due to the ad-hoc and rather dynamic nature of the drone mission trajectories, the system needs to deal with diverse and multiple changes affecting flight plans that can be received at short notice.
Research goals
DACUS intends to integrate in a consistent DCB solution the relevant demand and capacity influence factors (such as Communication, Navigation and Surveillance (CNS) performance availability), external constraints (such as airspace structures or regulatory framework), processes (such as separation management), and other U-space services that are part of the overall DCB process (such as Operational Plan processing or Strategic Conflict Resolution services).
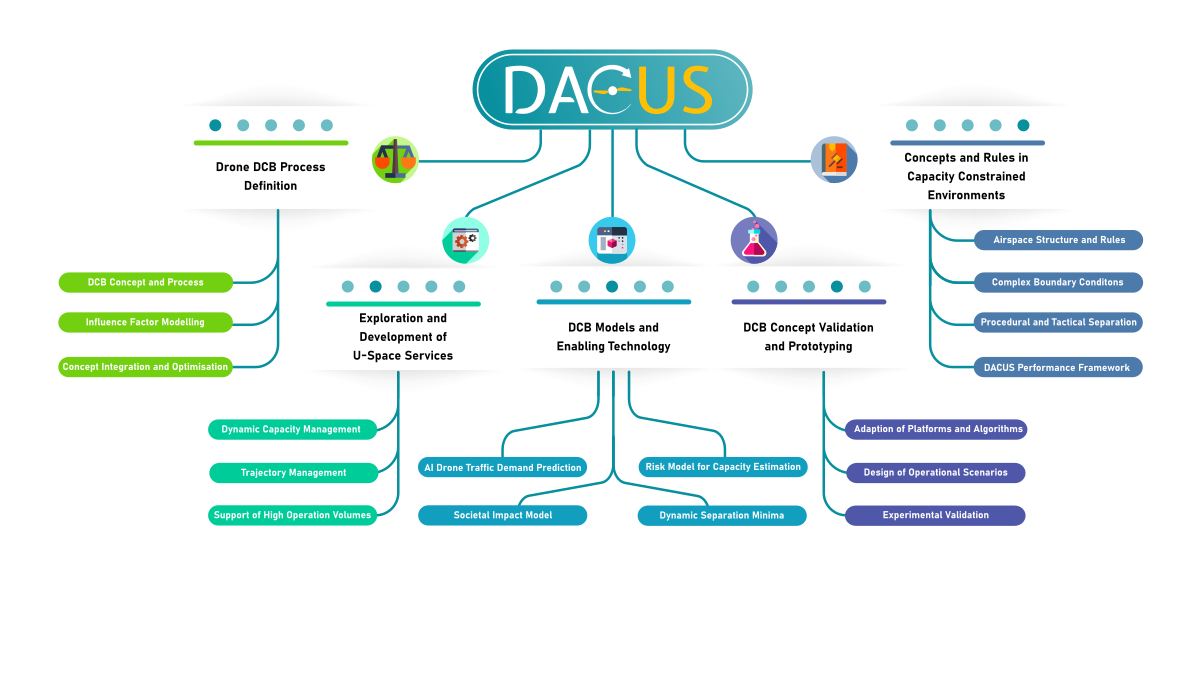
Therefore, to achieve the overall DACUS objective, five specific objectives are set:
- Develop a drone DCB process, from strategic to tactical phase, integrating uncertainty of planned operations and guided by the definition of a U-space performance scheme that include the development of metrics for airspace capacity appropriate for an environment with no human controller.
- Develop innovative services algorithms and enabling models and technologies as functional blocks of DCB process, able to support large number of simultaneous operations and to design and manage efficient and safe drone trajectories.
- Define a structure for Very Low Level (VLL) airspace and a set of airspace rules that optimises the trade-off between capacity and safety, including the definition of separation management process.
- Find the optimal balance between on-board separation intelligence and U-space separation service intelligence in tactical separation depending.
- Refine CNS requirements in support of tactical and procedural separation, with a focus on urban environment.
Demand and Capacity Balancing
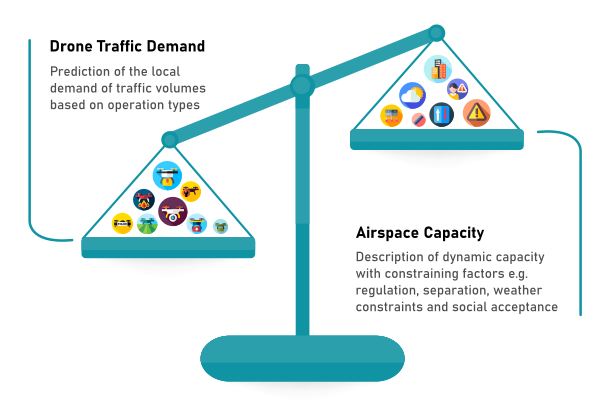
The balancing of traffic demand and airspace capacities is an essential tool to ensure safe and efficient traffic flows of UAV operations. It requires a well-informed decision-making process. But other than in manned aviation, the UAV sector has no established and observable system of operations to learn from. Furthermore and particularly with regard to dense low level flights, a high local volume can increase air and ground risks, affect social acceptance and has a notably impact on the environment.
Consequently, a demand and capacity balancing for U-space needs to take into account a diverse set of influence factors to forecast traffic volumes and determine constraining measures in a timely manner.
At DACUS, the main goal is to develop a consistent balancing process from the strategic to the tactical flight phase, that takes into account the uncertainty of planned operations and external factors as well as an integration into the service-based U-space concept that envisions a UAV ecosystem with no human controller.
Interested in being part of?
The DACUS project and FSR institute address various research questions, as stated above. We continuously carry on student theses and advance design projects (ADP). If you are particularly interested in one of the DACUS challenges, contact us for more information.
News & Media
Website: www.dacus-research.eu
LinkedIn: www.linkedin.com/company/dacus-project
Twitter: twitter.com/dacus_research
Consortium
The partners in the research consortium are a group of international companies with great expertise in the field of manned and unmanned aeronautics: aha (IS), Boeing Research and Technology Europe (ES), CRIDA (ES), EUROCONTROL, ENAIRE (ES), INECO (ES), ISA (FRA), Jeppesen (DE), Sopra Steria (FRA), Toulouse Métropole (FRA) and Darmstadt University of Technology (DE).
This project has received funding from the SESAR Joint Undertaking under the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 893864.
Public Reports
DACUS D1.1 Drone DCB concept and process (2021)
DACUS D5.1 Structures and Rules in Capacity Constrained (urban) Environments (2021)
White Papers
To highlight the contributions of DACUS research to the U-Space development, White Papers on key results obtained in the project are published.
DACUS D5.1 social acceptance survey results (2021)
The concepts from the DACUS research are serving as a starting point for student theses at FSR where they are explored with innovative ideas and methods. Some of these works are published in the format of compressed White Papers on the DACUS website.
White paper rule-based separation for dynamic airspace management

Hugo Eduardo M.Sc.
Contact
eduardo@fsr.tu-...
work +49 6151 16-21079
Work
L1|01 566
Otto-Berndt Strasse 2
64287
Darmstadt

Jan Kleikemper M.Sc.
Contact
kleikemper@fsr.tu-...
work +49 6151 16-21073
Work
L1|01 566
Otto-Berndt Strasse 2
64287
Darmstadt

