
Das Projekt DACUS (Demand And Capacity Optimisation in U-Space) hat die Entwicklung eines dienstleistungsorientierten Demand and Capacity Balancing (DCB) Prozesses für das Drohnenverkehrsmanagement im urbanen Umfeld zum Ziel. Das Erreichen dieses Ziels erfordert eine umfassende Untersuchung der Einflussfaktoren auf die Luftraumnachfrage und -kapazität sowie die Definition von Rollen und Verantwortlichkeiten, Prozessen und Diensten im Rahmen eines unbemannten Flugverkehrsmanagements (englisch: Unmanned Air Traffic Management, UTM).
Hintergrund
Die Ziele des DACUS-Projektes sind motiviert durch die Notwendigkeit, den SESAR U-Space durch die Integration entsprechender Dienste zu befähigen, rechtzeitig effiziente und sichere Entscheidungen treffen zu können, da die Nachfrage nach Drohnenflügen über besiedelten Gebieten rapide ansteigt. Künftige DCB-Managementprozesse im Zusammenhang mit dem U-Space sollen die gleichzeitige Flugplanung mehrerer Drohnenbetreiber unterstützen, um einen fairen Zugang zum Luftraum und ein angemessenes Gleichgewicht zwischen Systemkapazität und Nachfrage nach Drohnenoperationen zu gewährleisten. Da die Flugbahnen von Drohnenmissionen ad hoc und recht dynamisch sind, muss das System mit vielfältigen und mehrfachen Änderungen der Flugpläne umgehen können, die auch kurzfristig auftreten können.
Forschungsziele
DACUS beabsichtigt, die relevanten Nachfrage- und Kapazitätseinflussfaktoren (wie z. B. die Verfügbarkeit von Kommunikations-, Navigations- und Überwachungsleistungen (englisch: Communication, Navigation, Surveillance, CNS)), externe Beschränkungen (wie Luftraumstrukturen oder rechtliche Rahmenbedingungen), Prozesse (wie z. B. Separationsmanagement) und andere U-Space-Dienste, die Teil des gesamten DCB-Prozesses sind (wie z. B. die Verarbeitung von Einsatzplänen oder strategische Konfliktlösungsdienste), in eine einheitliche DCB-Lösung zu integrieren.
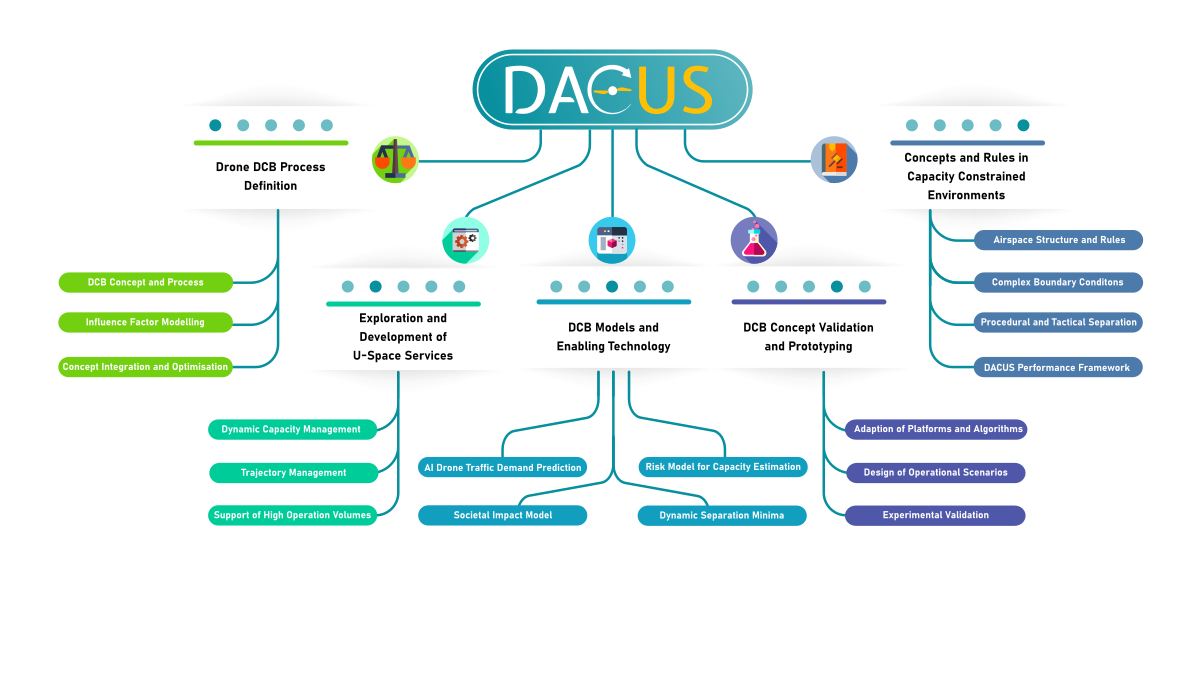
Zur Erreichung des DACUS-Gesamtziels werden daher fünf spezifische Schwerpunkte gesetzt:
- Die Entwicklung eines DCB-Prozesses für Drohnen, von der strategischen bis zur taktischen Phase, der die Unsicherheit geplanter Operationen einbezieht und sich an der Definition eines U-Space-Leistungsschemas orientiert, das die Entwicklung von Metriken für die Luftraumkapazität umfasst, die für eine Umgebung ohne menschlichen Überwacher geeignet sind.
- Entwicklung innovativer Dienstleistungsalgorithmen und unterstützender Modelle und Technologien als Funktionsblöcke des DCB-Prozesses, die in der Lage sind, eine große Zahl gleichzeitiger Operationen zu unterstützen und effiziente und sichere Trajektorien für Drohnen zu entwerfen und zu verarbeiten..
- Definition einer Struktur für den unteren Luftraum (Very Low Level, VLL) und einer Reihe von Luftraumregeln, die den Kompromiss zwischen Kapazität und Sicherheit optimieren, einschließlich der Definition eines Separationsmanagementprozesses.
- Ermittlung des optimalen Gleichgewichts zwischen bordseitiger Separationsverantwortung und Separationsverantwortung durch U-Space-Service .
- Verfeinerung der CNS-Anforderungen zur Unterstützung der taktischen und prozeduralen Separation mit Schwerpunkt auf dem städtischen Umfeld.
Demand and Capacity Balancing
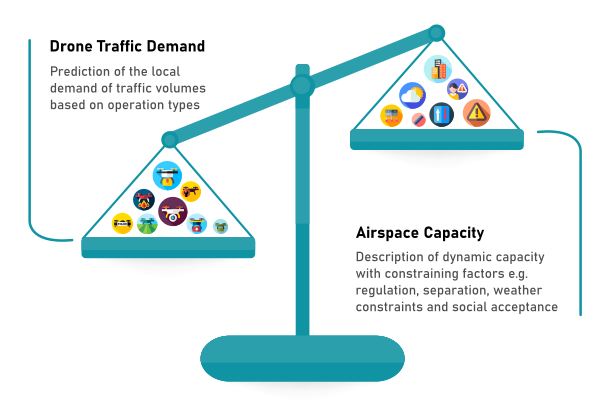
Die Abstimmung von Verkehrsnachfrage und Luftraumkapazitäten ist ein wesentliches Instrument zur Gewährleistung eines sicheren und effizienten Verkehrsflusses im UAV-Betrieb. Dies erfordert einen fundierten Entscheidungsprozess. Doch anders als in der bemannten Luftfahrt gibt es im UAV-Sektor kein etabliertes und beobachtbares System für den Betrieb, von dem man lernen könnte. Darüber hinaus kann ein hohes lokales Flugaufkommen, insbesondere in Gebieten mit einer hohen Verkehrsdichte von Low-Level-Flügen, die Risiken in der Luft und am Boden erhöhen, die soziale Akzeptanz beeinträchtigen und spürbare Auswirkungen auf die Umwelt haben.
Folglich muss ein Nachfrage- und Kapazitätsausgleich für den U-Space eine Reihe von Einflussfaktoren berücksichtigen, um das Verkehrsaufkommen zu prognostizieren und rechtzeitig beschränkende Maßnahmen festzulegen.
Das Hauptziel von DACUS ist die Entwicklung eines konsistenten Abwägungsprozesses von der strategischen bis zur taktischen Flugphase, der die Unsicherheiten geplanter Operationen und externer Faktoren berücksichtigt, sowie die Integration in das servicebasierte U-Space-Konzept, das ein UAV-Ökosystem ohne menschlichen Controller vorsieht.
Interesse mitzumachen?
Im Rahmen des DACUS-Projekts befasst sich das FSR mit verschiedenen Forschungsfragen, wie oben beschrieben. Wir betreuen laufend studentische Abschlussarbeiten und Advanced Design Projects (ADP). Wenn Sie sich besonders für eine der DACUS-Herausforderungen interessieren, kontaktieren Sie uns für weitere Informationen.
News & Media
Website: www.dacus-research.eu
LinkedIn: www.linkedin.com/company/dacus-project
Twitter: twitter.com/dacus_research
Konsortium
Die Partner des Forschungskonsortiums sind eine Gruppe internationaler Unternehmen mit großem Sachverstand auf dem Gebiet der bemannten und unbemannten Luftfahrt: aha (IS), Boeing Research and Technology Europe (ES), CRIDA (ES), EUROCONTROL, ENAIRE (ES), INECO (ES), ISA (FRA), Jeppesen (DE), Sopra Steria (FRA), Toulouse Métropole (FRA) und die Technische Universität Darmstadt (DE).
Dieses Projekt wurde vom SESAR Joint Undertaking im Rahmen des Forschungs- und Innovationsprogramms „ Horizon 2020“ der Europäischen Union unter Grant Agreement Nr. 893864 gefördert.
Öffentliche Berichte
DACUS D1.1 Drone DCB concept and process (2021)
DACUS D5.1 Structures and Rules in Capacity Constrained (urban) Environments (2021)
White Papers
Um die Beiträge der DACUS-Forschung zur Entwicklung des U-Space hervorzuheben, werden White Papers über die wichtigsten Ergebnisse des Projekts veröffentlicht.
DACUS D5.1 social acceptance survey results (2021)
Die Konzepte aus der DACUS-Forschung dienen als Ausgangspunkt für studentische Abschlussarbeiten am FSR, wo sie mit innovativen Ideen und Methoden erforscht werden. Einige dieser Arbeiten werden in Form von komprimierten White Papers auf der DACUS-Website veröffentlicht.
White paper rule-based separation for dynamic airspace management

Hugo Eduardo M.Sc.
Abgangsjahr 2022
Kontakt
eduardo@fsr.tu-...
work +49 6151 16-21079
Work
L1|01 566
Otto-Berndt Strasse 2
64287
Darmstadt

Jan Kleikemper M.Sc.
Kontakt
kleikemper@fsr.tu-...
work +49 6151 16-21073
Work
L1|01 566
Otto-Berndt Strasse 2
64287
Darmstadt

