In ACoRUs (Active Fault-Tolerant Control for Redundant Unmanned Aerial Vehicles) novel schemes of Fault-tolerant Control (FTC) are developed to increase the operational safety of redundant Unmanned Aerial Vehicles (UAVs).
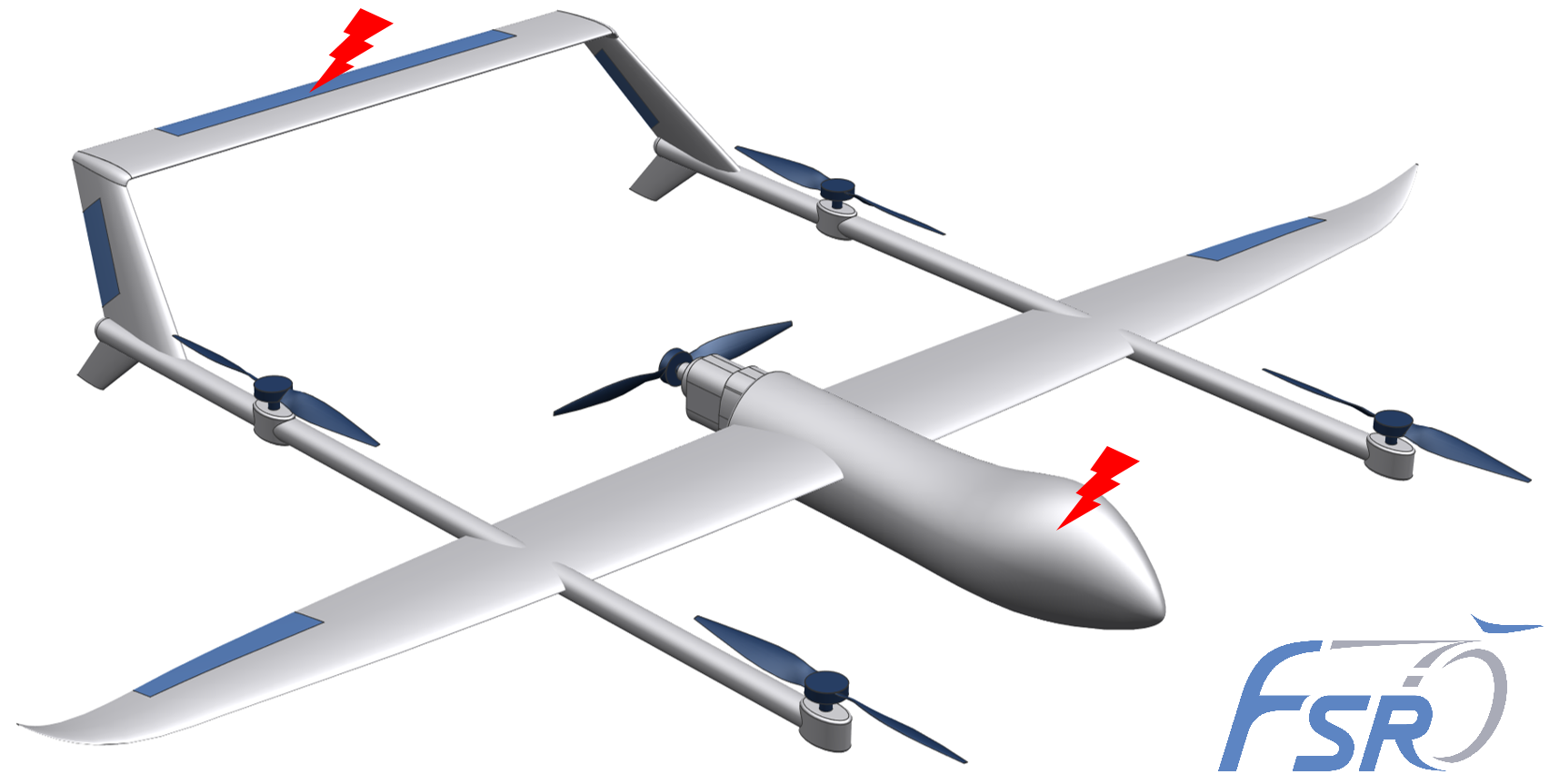
Small UAVs already play an important role in search and rescue missions and their area of application is subject to steady growth. Of special interest are innovative hybrid configurations, which are inherent over-acutated regarding control effectors. These are fixed-wing pusher UAVs with four additional rotors, which on the one hand allows for by performing energy efficient aerodynamic cruise flight and on the other hand for vertical take-off and landing.
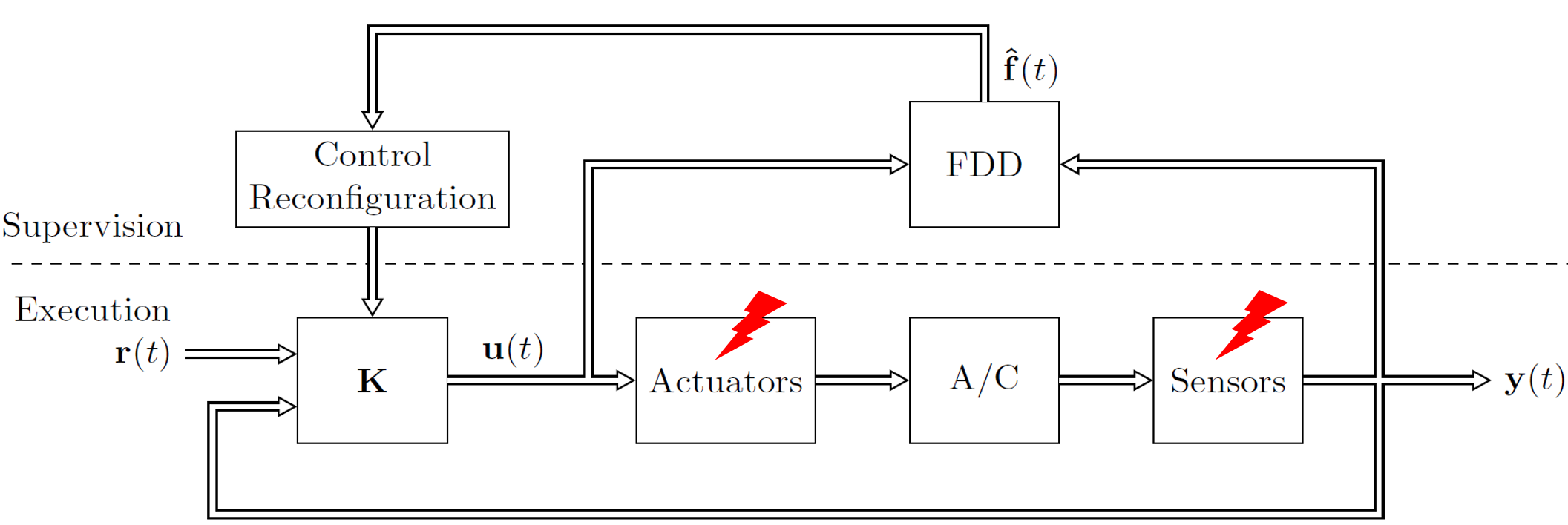
While the demand for dependability and reliability of such systems is also ever increasing, by further advancing in the direction of totally autonomous systems where direct human interaction is completely removed, they become even more prone to malfunctioning. To increase the operational safety new fault-tolerant control algorithms actuator and sensor failures are developed and tested at the Institute of Flight Systems and Automatic Control (FSR), so that even in the face of a fault the current mission can be completed successfully. The developed FTC methods are focused on:
- Reconfiguration schemes for performance optimization (also in fault-free mode)
- Online reallocation of the remaining control inputs adapted to the current system state
- Fault detection based on robust model-based approaches (instead of requiring hardware redundancy)
- Application of the developed methods to innovative UAV configurations