In ACoRUs (Active Fault-Tolerant Control for Redundant Unmanned Aerial Vehicles) werden neue Ansätze der fehlertoleranten Regelung (eng. Fault-tolerant Control, FTC) zur Erhöhung der operationellen Sicherheit redundanter unbemannter Luftfahrzeuge entwickelt.
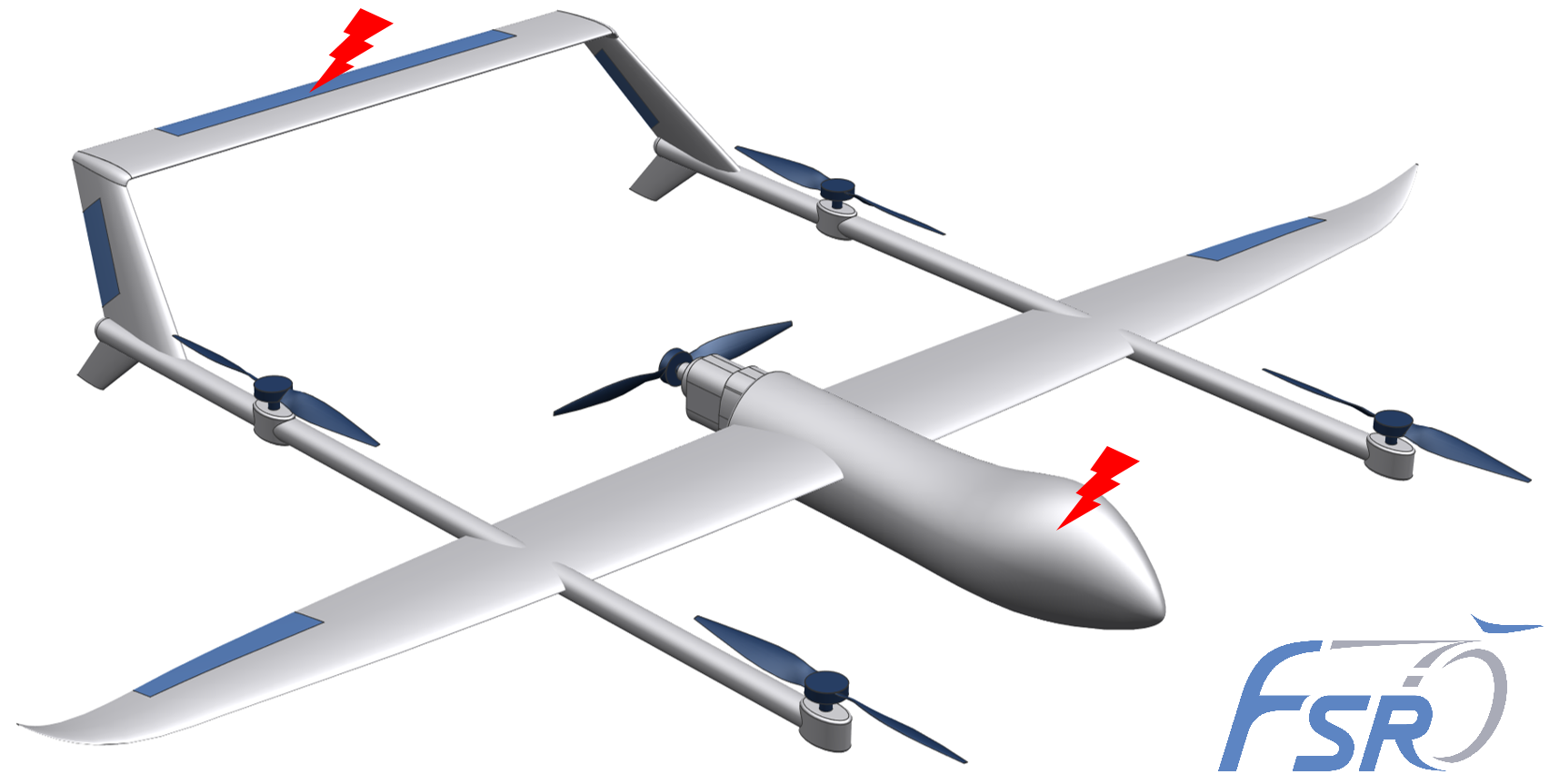
Kleine unbemannte Luftfahrzeuge (eng. Unmanned Aerial Vehicles, UAVs) spielen heutzutage bereits eine bedeutende Rolle in Such- und Rettungsaufgaben, wobei ihr Anwendungsbereich einem stetigen Wachstum unterliegt. Besonders interessant sind hierfür innovative hybride Konfigurationen, welche hinsichtlich ihrer Stellgrößen inhärent überaktuiert sind. Dabei handelt es sich um Flächenflieger mit Pusher-Antrieb sowie vier zusätzlichen Hubrotoren, was zum einen die Möglichkeit zu effizientem aerodynamischen Flug und zum anderen auch Senkrechtstarts und –landungen ermöglicht.
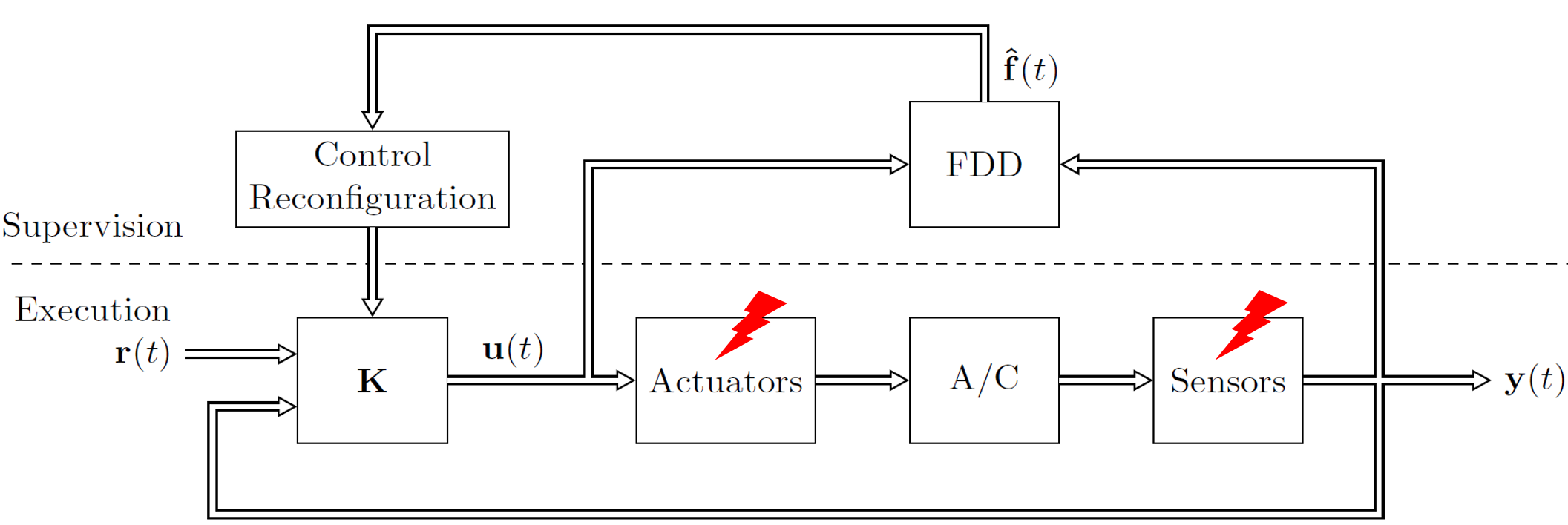
Während der Bedarf nach Stabilität und -zuverlässigkeit für solche Systeme gleichermaßen zunimmt, werden sie aufgrund des Fortschritts in Richtung vollständig autonomen Betriebs ohne direkte menschliche Interaktion zunehmend anfälliger für Fehlfunktionen. Zur Erhöhung der operationellen Sicherheit werden am FSR neue fehlertolerante Regelungsalgorithmen entwickelt, mit deren Hilfe auch Ausfälle einzelner Aktoren (oder Sensoren) kompensiert werden können, um somit auch im Fehlerfall den erfolgreichen Abschluss einer Mission zu gewährleisten. Der Fokus der entwickelten FTC-Methoden liegt dabei auf:
- Rekonfigurationsmechanismen zur Performanzoptimierung (auch im fehlerfreien Betrieb)
- An den Systemzustand angepasste Online-Reallokation der verfügbaren Stellgrößen
- Fehlerdetektion basierend auf robusten modellbasierten Ansätzen (anstatt der Notwendigkeit nach Hardware-Redundanz)
- Anwendung der entwickelten Methoden auf innovative UAV-Konfigurationen