
The evaluation of the technical mission risk of unmanned aerial systems is being progressed at the FSR funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation). The goal of the project is to aggregate all technical risks of an unmanned flight operation in a dynamic data-based estimation. For this purpose, suitable methods from the field of machine learning will be combined at both the component and system level.
Current studies by SESAR (Single European Sky Air Traffic Management Research) and the FAA (Federal Aviation Administration) assume that the market for civil unmanned aerial vehicles (UAVs) will grow strongly in the coming years. A major challenge here is the safe and cost-effective integration of unmanned air traffic into existing airspace. UAVs are often built from common off-the-shelf components without consideration for redundancy, and thus do not achieve the high reliability that certified aircraft must meet. Nevertheless, these UAVs are expected to become part of the highly complex, safe air traffic system.
Using a hybrid UAV as an example, the project explores the use of PHM methods for a complementary safety system. According to the current state of the UAV components, a continuous technical risk assessment shall be performed. This shall support the operator in his decision making and prepare him for possible contingencies, e.g. to decide on a premature mission abort in case of system degradation. The procedure is mainly data-based and is intended as an additional safety barrier to avoid the particularly critical event of “loss of control” of the aircraft altogether.
Project goals
1. research reliable online-capable data-based diagnostic and prognostic methods for monitoring safety-critical subsystems of a UAV,
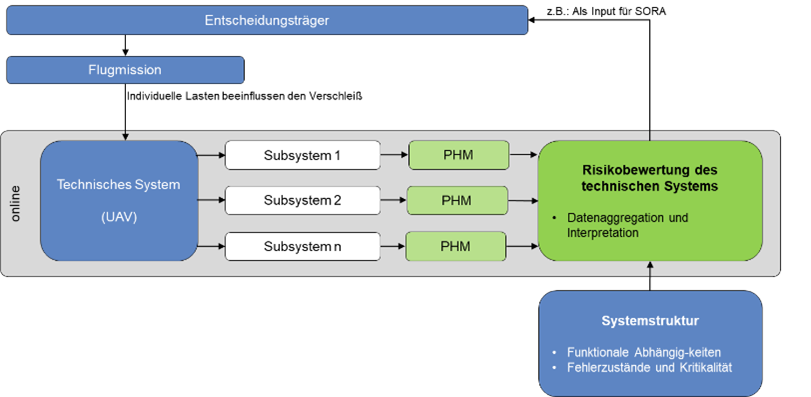
2. research a higher-level method for linking the stochastic prognostic models with the functional dependencies of the individual subsystems and components,
3. and to determine the resulting technical risk of the system “UAV” in real time in order to provide the operator with an additional assistance function.
For further questions or interest regarding a thesis please contact Max Weigert


