MAAM (Mission-based Availability Assessment for Multirotor UAVs) ist ein drittmittelfinanziertes Projekt mit dem Ziel die Sicherheit von autonomen Multikoptern durch moderne PHM-Algorithmen und intelligente Überwachungssysteme zu erhöhen.
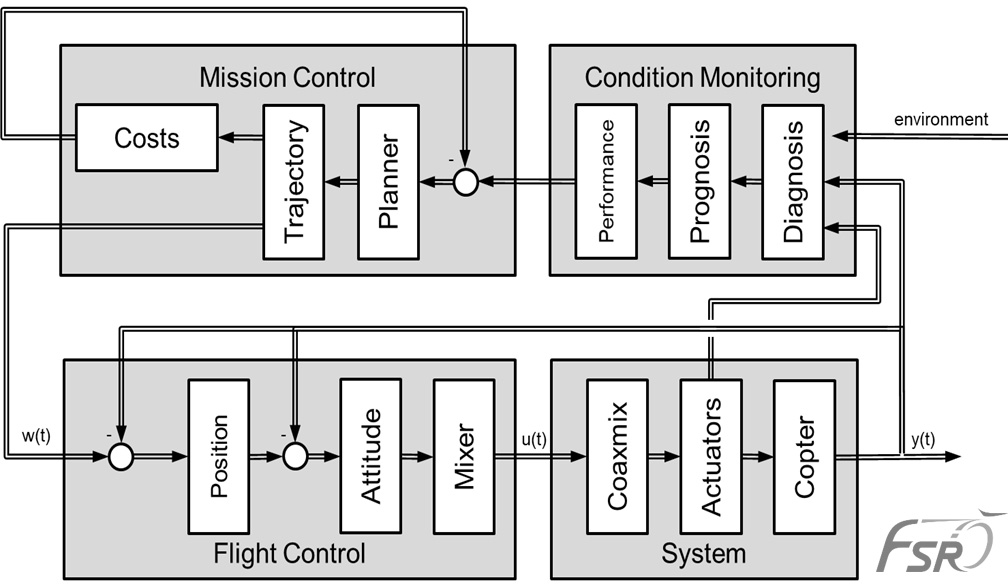
Kleine unbemannte Multikoptersysteme bieten zahlreiche Einsatzmöglichkeiten in den verschiedensten Geschäftsfeldern. Aktuelle Studien prognostizieren einen rasanten Anstieg des Marktes. Grundlage für eine wirtschaftliche Nutzung ist jedoch oft ein zumindest teilautonomer Flug ohne einen direkten Steuerer. Aus Sicherheitsgründen wird hierfür zwingend ein System benötigt, welches in der Lage ist auf jegliche Störungen des Missionsplans zu reagieren. Neben den umgebungsbedingten Störungen wie Wind oder unerwarteten Hindernissen bilden technische Störungen des Flugsystems das größte Gefahrenpotential. Mit Hilfe moderner PHM-Algorithmen (PHM = Prognostics and Health Management) sowie einer Zustandsüberwachung kann der Systemzustand jederzeit diagnostiziert und teilweise auch prognostiziert werden.

Modelle des Flugsystems ermöglichen nun eine Bestimmung relevanter Flugleistungsparameter abhängig vom derzeitigen Systemzustand. Zudem werden die Modelle für die prognostische Belastungsermittlung aus dem Missionsplan verwendet. Ein Vergleich der Belastungen von verschiedenen hierarchisch strukturierten Missionen mit den zustandsabhängigen Flugleistungsparametern führt zu Informationen über die missionsspezifische Verfügbarkeit des UAVs und ermöglicht zudem die Bestimmung des Risikos für ein Scheitern.
Inhaltlich umfasst das Projekt folgende Punkte:
- Entwicklung von Verfahren und Methoden zur Bestimmung der Flugleistung von Multikoptern
- Aufbau eines X8-Forschungsmultikopters mit redundanten Antriebssträngen in koaxialer Anordnung
- Detaillierte Systemanalyse, Ableitung flugmechanischer Modelle und Leistungsparameter sowie Definition kritischer technischer Komponenten mit Hilfe gängiger Verfahren (FTA, FMECA)
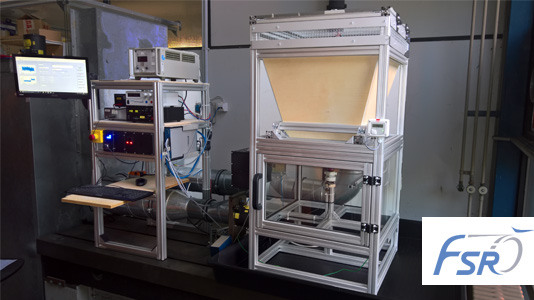
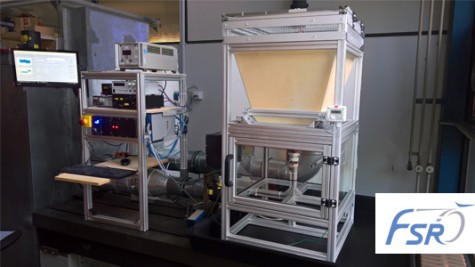
- Inbetriebnahme eines Prüfstands zur Analyse von Komponentenfehlern des Antriebsstrangs von Multikoptern sowie der Untersuchung von Leistungsverlusten infolge von Umgebungsstörungen
- Aufbau einer komplexen Simulationsumgebung zur Untersuchung von Verfahren zur Bestimmung des Systemzustands und der missionsbasierten Verfügbarkeit des Forschungsmultikopters
- Analyse von Grenzen und Fehlern der Verfahren und Algorithmen sowie Bewertung des Gesamtverfahrens hinsichtlich der industriellen Anwendbarkeit
Evaluation (Prüfstand und Demonstrator)
Ziel von Prüfstand und Demonstrator ist zum einen die Verifikation von Modellen der Simulationsumgebung und zum anderen die Analyse von Systemverhalten, technischen Fehlern und Umgebungseinflüssen auf die Flugleistung.