
As the number of active satellites in Earth orbit continues to grow, the need for coordination to avoid collisions becomes increasingly important. However, due to the lack of international laws and guidelines, satellite operators are left alone with the task of clarifying with the other party whether an avoidance manoeuvre should be executed and which party should carry it out for each collision event on an ad-hoc basis.
CASCADE (Collision avoidance, satellite coordination assessment demonstration environment) is a demonstrator that is currently developed by OKAPI:Orbits and the Institute of Flight Systems and Automatic Control (FSR) of TU Darmstadt, building on the findings of FSR results from the Rules4CREAM activity. CASCADE is conducted within ESA’s General Support Technology Program (GSTP) to support the Collision and Risk Estimation and Automated Mitigation (CREAM) cornerstone of the Space Safety Programme.
CASCADE comprises the development of two software components that will work in tandem to support satellite operators in automating their collision avoidance procedures:
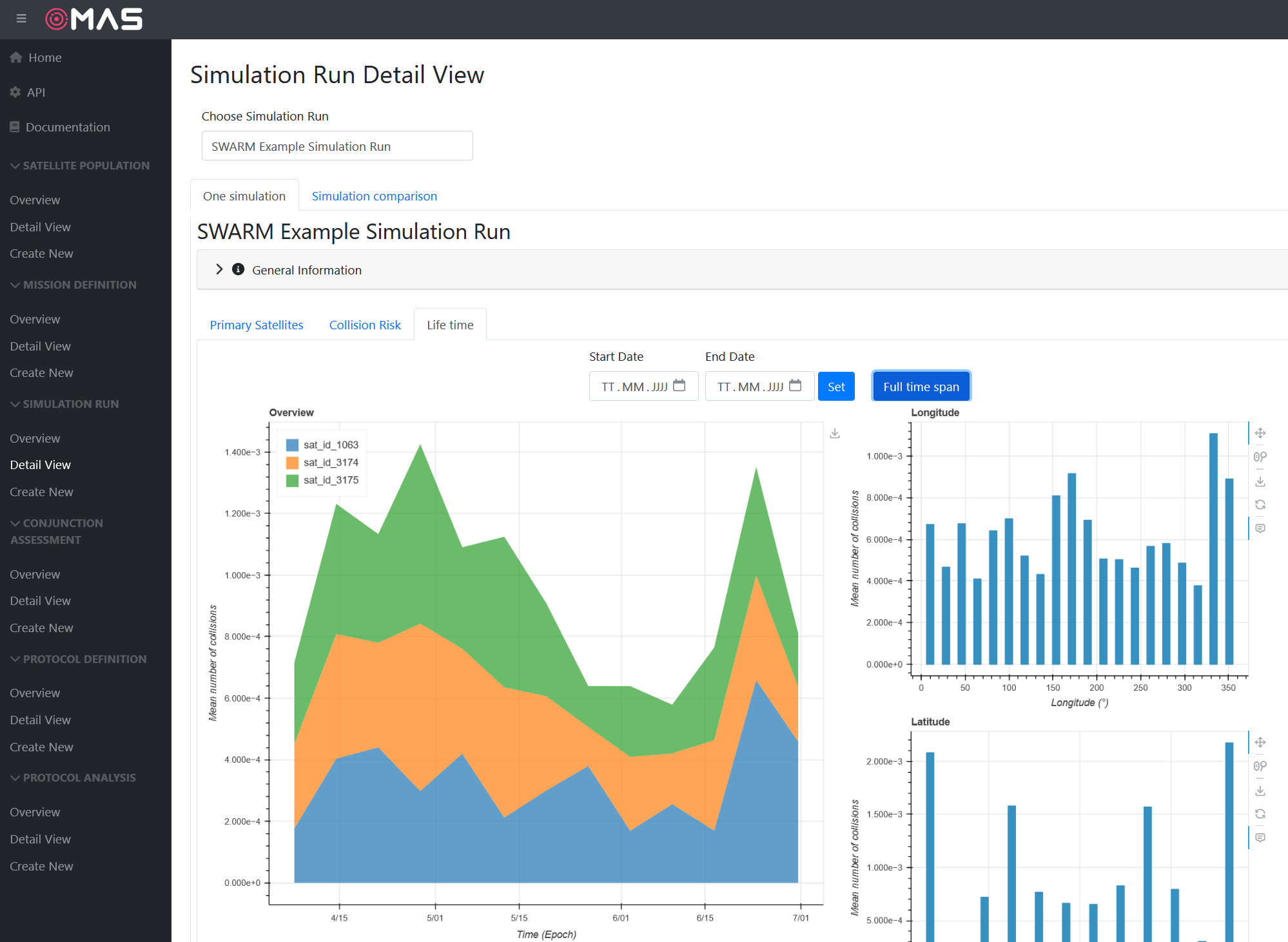
The Mission Analysis Software (MAS) is developed by FSR and has the objectives to enable satellite operators, agencies, authorities, and service providers to:
- Identify frequently encountering objects over the life time of a mission
- Quantify the effort associated with performing collision avoidance manoeuvres for the detected conjunction events
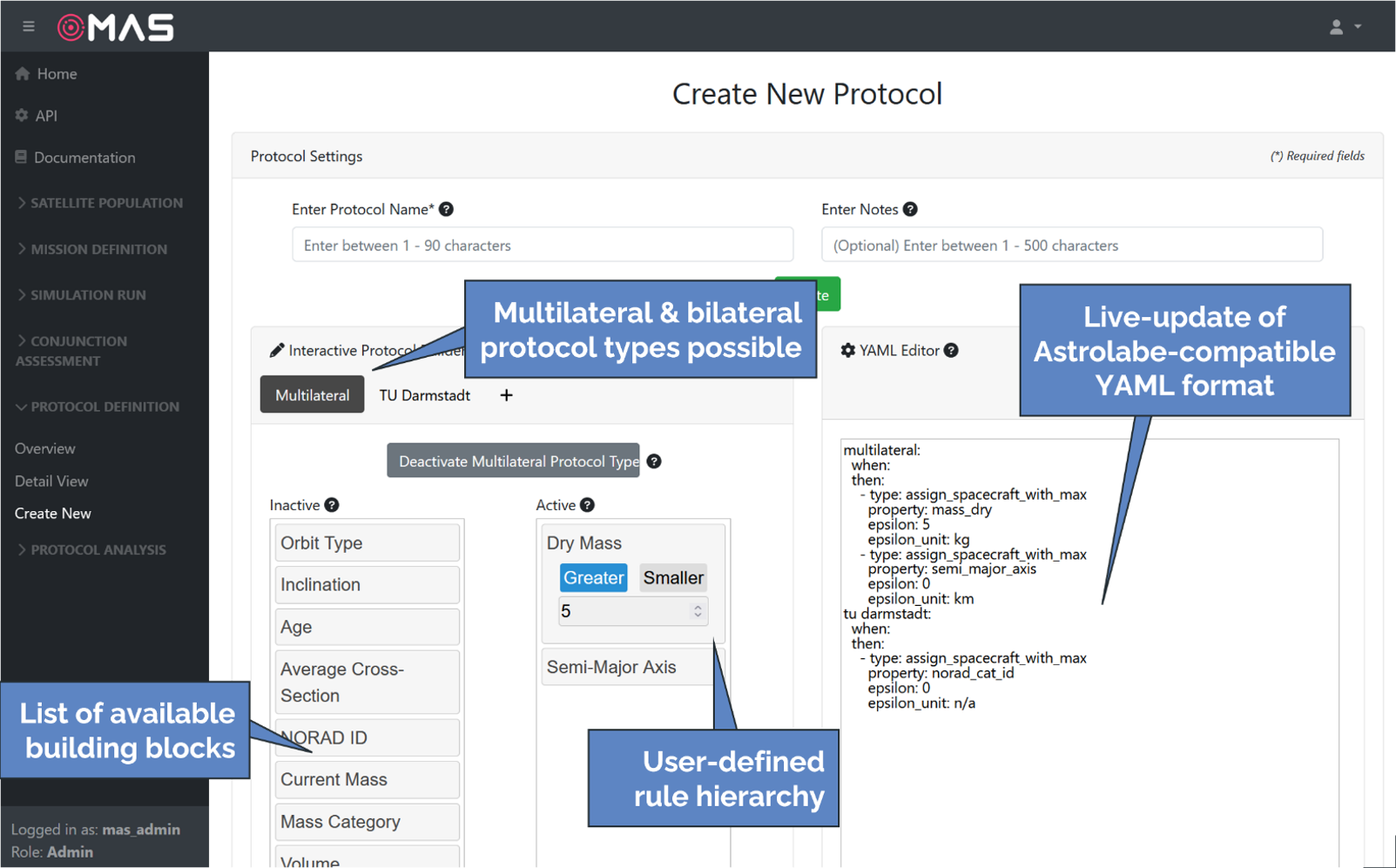
- Find suitable bilateral rule sets to reach a user-defined split of effort between operators with frequent conjunctions

The Operational Coordination Platform (OCP) is developed by OKAPI:Orbits and has the objectives to enable satellite operators to:
- Coordinate their activities in the context of upcoming events
- Assess conjunction events to reach a common picture of the situation
- Share relevant data for the assessment of the conjunction events
- Apply bilateral rule sets created in the MAS to deal with future conjunctions with another party
Together, the two software components provide a holistic solution for collision avoidance throughout the life cycle of satellite missions.
Objectives of CASCADE
- Modelling of possible future satellite population scenarios
- Providing a sophisticated simulation environment for the long-term propagation of satellite populations and conjunction detection
- Development of suitable rule sets for collision avoidance
- Offering users assessment tools for analyzing the detected conjunction events
- Providing information about the consequences of chosen rule sets for operators, allowing them to make informed data-based decisions about which rule sets to implement.
- Identifying suitable rule sets for achieving a user-defined split of effort between two operators

